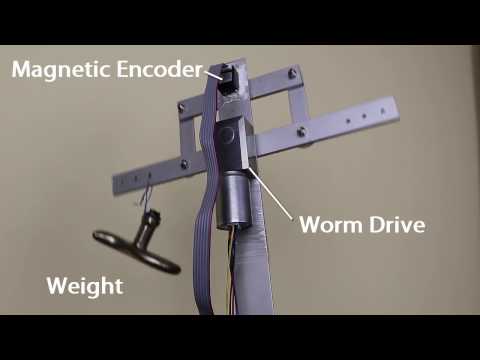
Controls a motor by evaluating position feedback from a magnetic encoder
-
Based on Atmega328P @ 2 MHz
-
Absolute magnetic rotary encoder EMS22A is mounted on the PCB
-
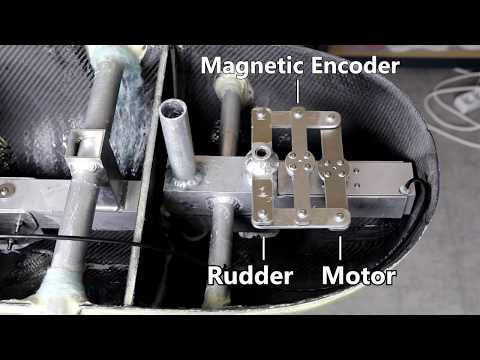
Used with JGY-2838 or a similar motor controlled by a two-wire interface
-
The two-wire output can be used as serial RX/TX for debugging
-
One can use a stepper motor by connecting the two-wire output to a stepper motor driver
-
PWM input like a typical servo or serial input (serial version has been chosen as it's more precise than reading the pulse length)
-
It provides a feedback to the main controller to determine if the motor is overloaded or stuck

It has been designed as a robust solution for steering the rudder on autonomous boat. The life span has been tested with a worm geared motor JGY-2838.
Ongoing test: 2 million cycles