This repository contains:
- Map Merging Tool
This was created as a part of the deliverables for the Final Year Project (FYP) under the National University of Singapore (NUS) in AY2021/2022. The project was titled "Agnostic Robot Fleet Manager Optimiser: Fleet Management Connectivity and Map Merging".
Run a recursive installment of the requirements.txt file.
# At the root of the repository
pip3 install -r requirements.txtThere exists two final products:
- Multi-Map Stitcher Class
- Pair-Map Stitcher Class
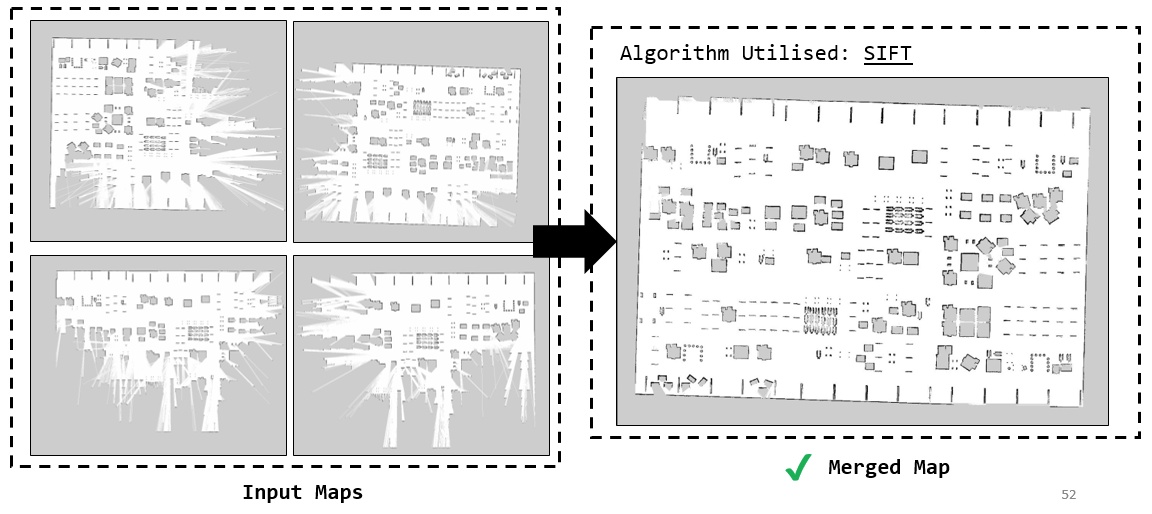
This class was created to stitch multiple overlapping partial maps together regardless of the quantity and order of input.
The test file for this class can be found as shown below.
cd fyp_fleet_management/Map_Merging/Product/Multi_Map_Stitcher
python3 map_merger_plugin_test.pyThe unique feature of this class is that it can switch which feature-detector-descriptor algorithm to be utilised for the run of the stitch. The selection is made when the object is first instantiated. Note that an array of images and their file names are to be provided at instantiation.
import cv2 as cv
from map_merger_plugin import MultiMapMerger
# Load and populate the class with required inputs
# 1) selection_num - an integer that relates to the algorithm being utilised
# 2) list_of_image_names - an array of image names (basically the name of the image file)
# 3) list_of_images - an array of image (in numpy.ndarray format)
merger = MultiMapMerger(selection_num = 0, list_of_image_names = array_of_names, list_of_images = array_of_img)
# Set the process in motion
packed_information = merger.stitch()
(successful, error, merged_img) = packed_information
if successful:
cv.imshow('Merged Image', merged_img)
cv.waitKey(0)
else:
print(error)
sys.exit(0)Here are the selection numbers for each algorithm incorporated into the code block.
0 - SIFT
1 - BRISK
2 - ORB
3 - KAZE
4 - AKAZEThis class was created to stitch a pair of overlapping partial maps together. The limitation is that images need to be provided in its true order. For example, the left image supplied must be the true left portion of the full merged image.
The test file for this class can be found as shown below.
cd fyp_fleet_management/Map_Merging/Product/Pair_Map_Stitcher
python3 pair_map_merger_plugin_test.pyThe unique feature of this class is that it can switch which feature-detector-descriptor algorithm to be utilised for the run of the stitch. The selection is made when the object is first instantiated. Note that an array of images and their file names are to be provided at instantiation.
import cv2 as cv
from pair_map_merger_plugin import Pair_Stitcher
# Load and populate the class with required inputs
# 1) selection_num - an integer that relates to the algorithm being utilised
# 2) list_of_image_names - an array of image names (basically the name of the image file)
# 3) list_of_images - an array of image (in numpy.ndarray format)
stitcher = Pair_Stitcher(list_of_images = array_of_img, list_of_image_names = array_of_names, selection_num = 5)
# Set the process in motion
result_parcel = stitcher.stitch()
# Unpack the information
(error_1, merge_order_1, error_2, merge_order_2) = result_parcel
if len(error_1) == 0:
cv.imshow('Order 1', merge_order_1)
if len(error_2) == 0:
cv.imshow('Order 2', merge_order_2)
cv.waitKey(0)Here are the selection numbers for each algorithm incorporated into the code block.
0 - SIFT
1 - BRISK
2 - SIFT-GeoDesc
3 - SIFT-ContextDesc
4 - ORB
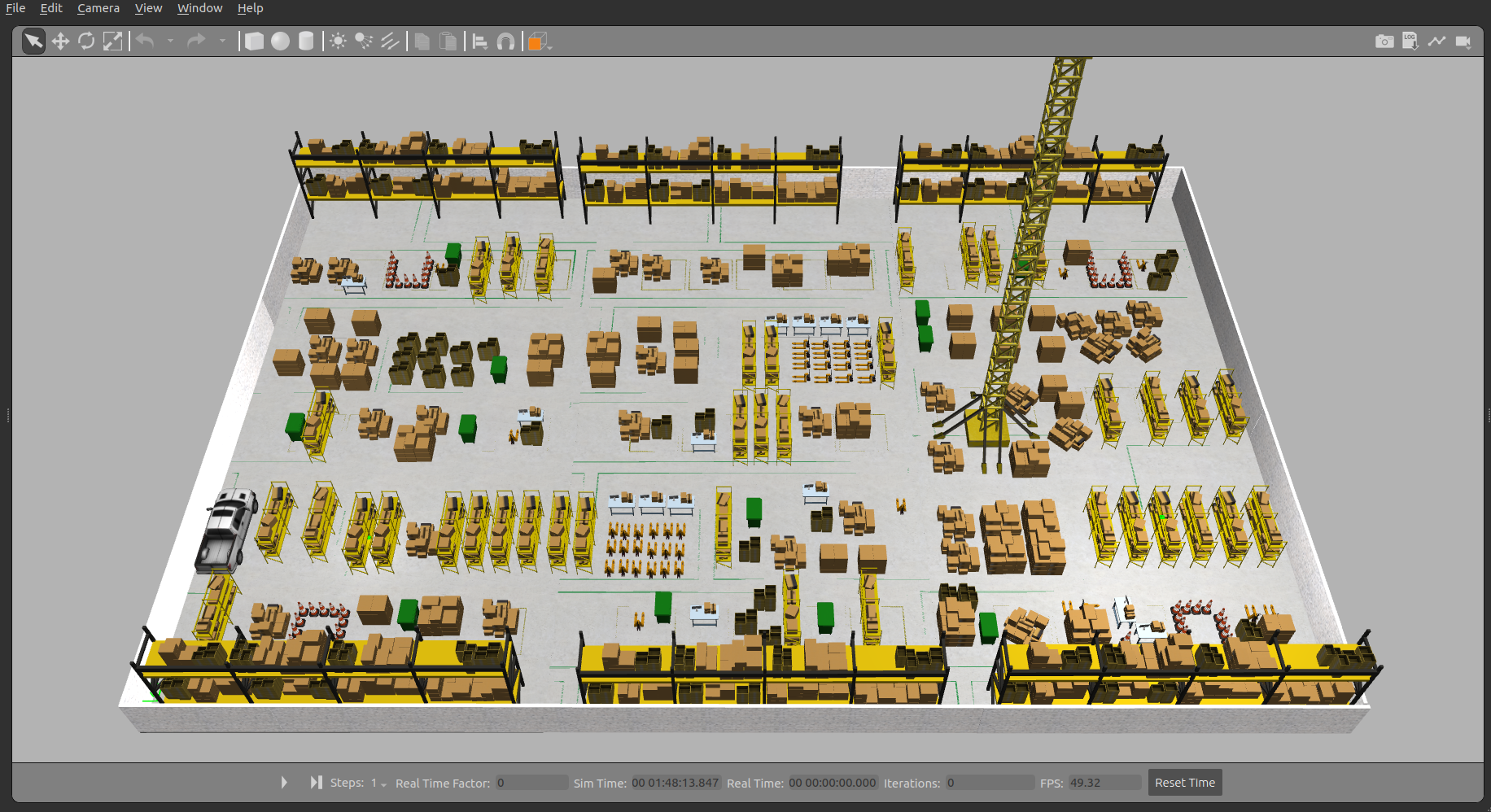
5 - SURF (PATENTED AND NOT TO BE USED FOR COMMERCIAL PURPOSES)A warehouse world was created from the cloning of the small warehouse world by AWS Robomaker [https://github.com/aws-robotics/aws-robomaker-small-warehouse-world].
The mir_ws can be cloned into your local machine, and can be found here:
cd fyp_fleet_management/Warehouse_Simulation/mir_wsThe spawning of the MiR robot into the enlarged AWS warehouse world is executed via the following command(s):
export GAZEBO_MODEL_PATH=~/mir_ws/src/mir_robot/mir_gazebo/models
roslaunch mir_gazebo mir_aws.launch
rosservice call /gazebo/unpause_physicsMapping is executed by the following command:
rosservice call /gazebo/unpause_physics
roslaunch mir_navigation hector_mapping.launch
roslaunch mir_navigation move_base.xml with_virtual_walls:=false
rviz -d $(rospack find mir_navigation)/rviz/navigation.rviz